
Finx - A Native and WebAssembly Financial Visualizer
How I built a cross-platform financial data visualization tool in C++ using Dear ImGui and ImPlot, and the real challenges you'll hit when doing the same
May 23, 2026
Latest project updates and topics I'm interested in
How I built a cross-platform financial data visualization tool in C++ using Dear ImGui and ImPlot, and the real challenges you'll hit when doing the same
May 23, 2026

How I designed a single-lane Manchester-encoded SerDes PHY for TinyTapeout, covering the PLL, CDR, TX and RX datapaths, I2C CSR interface, and the challenges of building analog-digital mixed-signal circuits in an open-source PDK.
May 23, 2026

A deep dive into instruction decoding, CSRs, traps, ELF loading, Sv32 MMU, and Linux boot in a ~1000-line C++ RISC-V 32b emulator
March 15, 2026
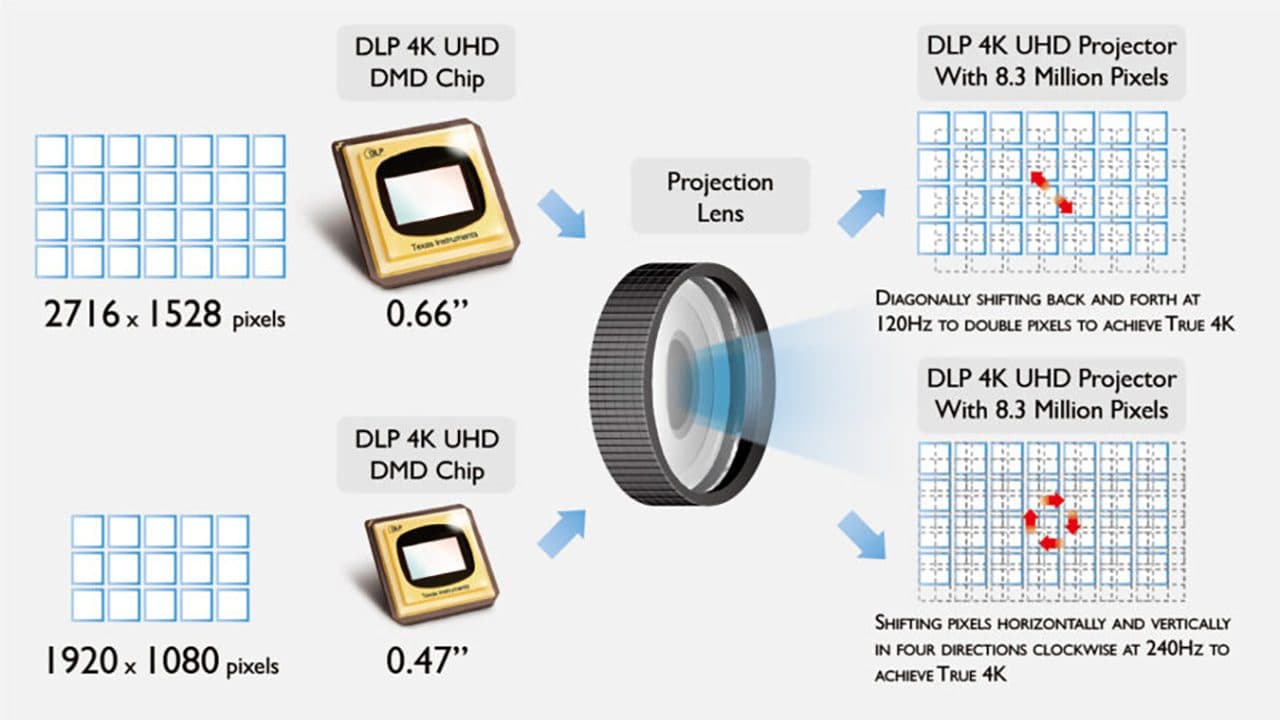
Repurposing a 4K DMD Projector for Maskless Photolithography
February 1, 2026
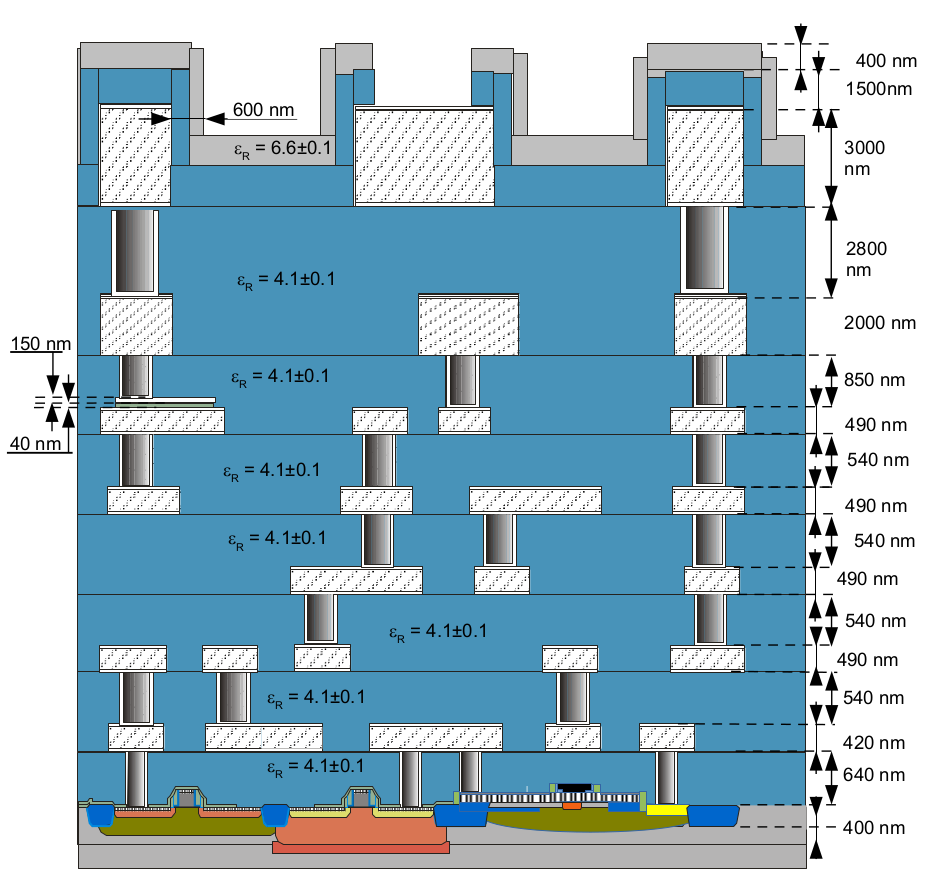
A device-level design and analysis of a CMOS inverter
December 23, 2025
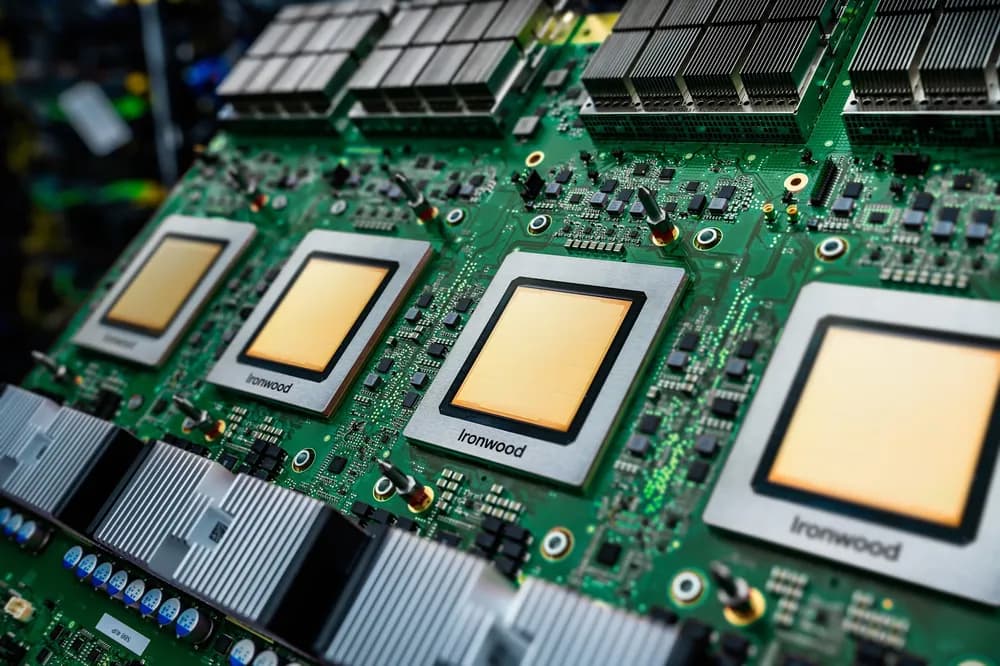
A deep dive into Google Cloud’s seventh‑generation TPU, Ironwood - designed for large‑scale, low‑latency AI inference and model serving.
December 2, 2025
A deep dive into Nvidias $2 billion investment in Synopsys and the implications of their multi-year partnership for AI-accelerated semiconductor design.
December 2, 2025

A deep dive into the 2D gameplay logic and the 3D state-space graph engine powering the Tic-Tac-Toe visualizer.
September 4, 2025

Adding Linux support to esp32s3
August 3, 2025
A low-cost microscope projection photolithography system for high-resolution fabrication
April 18, 2025

Fixed-wing and multirotor flight controller
January 2, 2024