Overview
Hermes is designed to function as the base flight control system responsible for guidance, navigation and control of a fixed-wing UAV - but general enough for most other vehicles.
Aims
- Design a complete flight control system from scratch (hardware, software, control systems, navigation algorithms, ground control station, etc..)
- Goal: Complete system consisting of standardised hardware and basic but robust software framework.
- Focus on developing and testing novel algorithms - not writing low-level code!
Hardware Requirements
- Standard set of sensors (e.g. IMU, barometer & airspeed sensor)
- Expansion and interface capabilities via various IOs.
- Power distribution for servos.
- Processing power.
- Affordability!
Hardware Specification
Bill of Materials
| S/N | Component | Qty | Description | Unit Price (CAD) | Price (CAD) |
|---|---|---|---|---|---|
| 1 | RP2040 | 2 | Flight Control Computer: Main MCU for polling IMU and Radio PPM for control loop Navigation Computer: Secondary MCU handling onboard guidance & navigation algorithms + extras | $1.45 | $2.90 |
| 2 | Invensense MPU6050 | 1 | 6DOF MEMS IMU (Gyroscope + Accelerometer) | $3.50 | $3.50 |
| 3 | NXP MPL3115A2 | 1 | Absolute pressure sensor with an I²C digital interface | $3.50 | $3.50 |
Datasheets
- RP2040
- Dual ARM Cortex-M0+ @ 133MHz
- MPU6050
- 6-axis MotionTracking device that combines a 3-axis gyroscope, 3-axis accelerometer, and a Digital Motion Processor™ (DMP)
- MPL3115A2
- I²C precision pressure sensor with altimetry
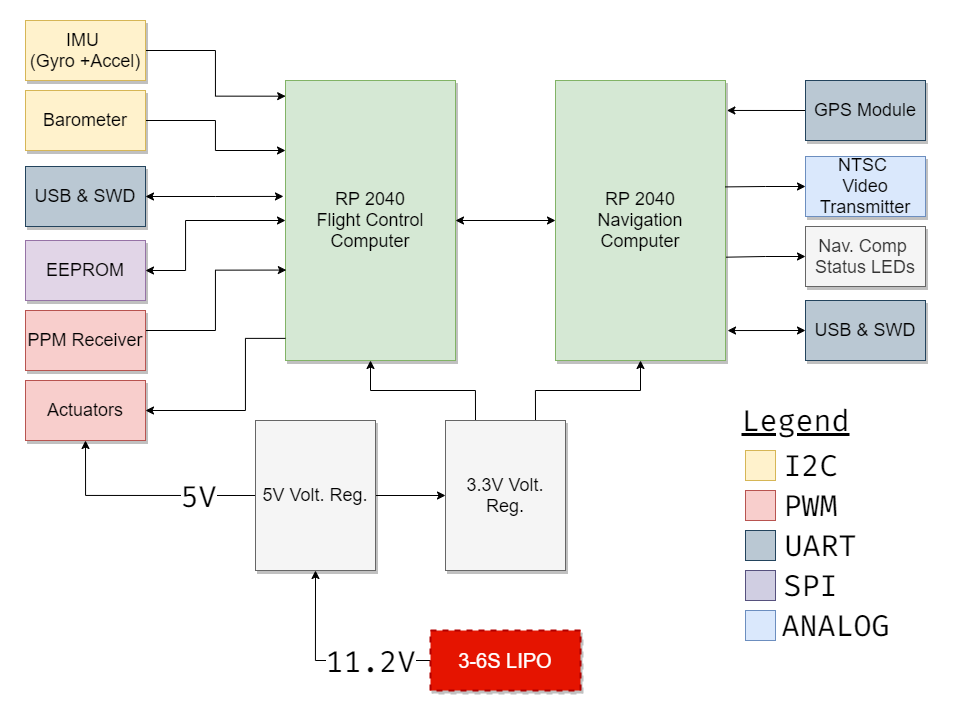
Block Diagram
Next Steps
A list of a few things to complete:
- [100%] Telemetry and messaging protocol.
- [100%] Aircraft modelling, control system design and implementation.
- [100%] Higher-level firmware (state machine, guidance algorithms, etc.)
- [100%] Low-level firmware (e.g. device drivers and interfaces).
- [100%] State Estimation (Madgwick & Kalman filters).
- [100%] Ground control station.
Last Updated: Today